私は Windows 10 22H2 に、Visual Studio 2019 をインストールして、Windows SDK 2004 と WDK for Windows10 2004 を導入した。正しくインストールされれば、Visual Studio を立ち上げたときの「新しいプロジェクト作成」で Driver 制作のプロジェクトが使用できる。
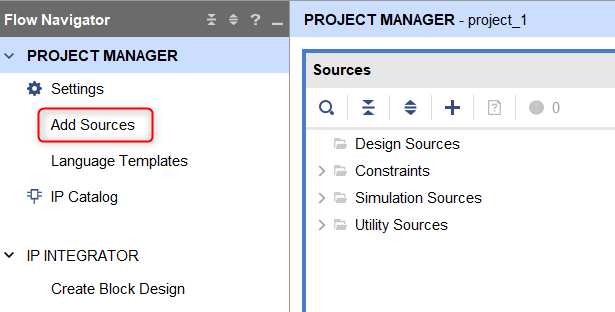
「Add Files」から、それぞれ .xdc (constraints) や .v (design sources) などを追加していく。この時「Copy Sources into project」のチェックは off。「Scan and add RTL include files into project」のチェックは on にしておく。
Bitstream の生成
Design Sources と Constraints を追加したら Bitstream を生成する。左側のパネルの「PROGRAM AND DEBUG」から「Generate Bitstrea」を押す。
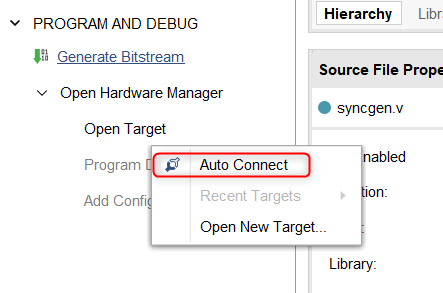
FPGA に書き込む
FPGA を PC に接続して電源を入れる。「PROGRAM AND DEBUG」の Open Hardware Manager -> Auto Connect を選択する。上部に「Program Device」が出てくるので、選択すると書き込める。